RANGKAIAN RECEIVER MOBILE REMOTE CONTROL
Pada artikel ini saya coba menyajikan rangkaian penggerak pada unit penerima (receiver) mobil remote control.
Oscilator, dibangun dari 1 Transistor dengan bantuan resistor; kapasitor dan T1 membentuk sebagai rangkaian penerima sinyal radio dengan frequensi tertentu. Frequensi yang umum pada remote control mobil mainan ( RC/ QD) adalah 27MHZ, 33MHz, 35MHz, 40MHz dan 49MHz
( ralat gambar : karena males gambar lagi, dioda zener pd gambar 1,6 volt. yang benar 4,6volt )
 |
| gb. OSC PENERIMA |
Pencacah, pulsa-pulsa frekuensi radio yang diterima dari pemancar menjadi pulsa-pulsa kotak yang bisa diterima sebagai sinyal digital oleh IC CMOS. Sinyal digital tadi akan diterima sebagai clock yang akan dicacah oleh IC RX -2B akan sesuai dengan jumlah pulsa yang dikirim pemancar. Jumlah frequensi pulsa merupakan sebuah perintah tertentu (maju, mundur,kiri, kanan). Jumlah ini menentukan kaki output mana yang akan aktif untuk melalukan perintah (“ON” / berlogic “1”). Output perintah pada IC RX-2B terdapat pada pin 10,11,12 dan 6 & 7
Sinyal digital yang diterima selain dipakai sebagai clock pencacah RX-2B yang dibicarakan di atas, dipakai pula untuk menggerakan rangkaian penunda waktu untuk mengatur kerja rangkaian. Termasuk untuk me”reset” dan memulai pembaca pulsa (kode perintah) berikutnya

PIN KAKI IC RX-2B
Pada IC RX-2B keluaran Pin 10, 11, 12 diumpankan pada rangkaian H-Bridge sebagai penggerak motor. H-Bridge ini telah dimodifikasi menjadi 2 macam keluaran tegangan. Dengan besar teg 9,6 Volt untuk mensuplay motor pada speed dua (turbo) dan 7,2 volt untuk speed 1 ( maju normal ) serta mundur.

SKEMA H-BRIDGE DUA SPEED
(penggerak belakang)
Transistor pada H-bridge ini menggunakan transistor dengan daya sedang hingga besar. Untuk daya sedang saya menggunakan TR D882 dan TR B772. Untuk daya yang lebih besar bisa menggunakan type TIPxxx. IRFxxx. Dimana saya belum menemukan type yang cocok hingga belum berani merekomendasikan type transistor ini.
Sedangkan Pin 6 & 7 bertugas mengendalikan Motor B pada bagian depan, yang berfungsi untuk berbelok kiri maupun kanan. Keluaran pin 6&7 diumpankan pada rangkaian 6 transistor yang membentuk sebuah H-Bridge. H-Bridge dipakai untuk mengendalikan motor yang mengatur gerak mobil-mobilan kekiri/kanan

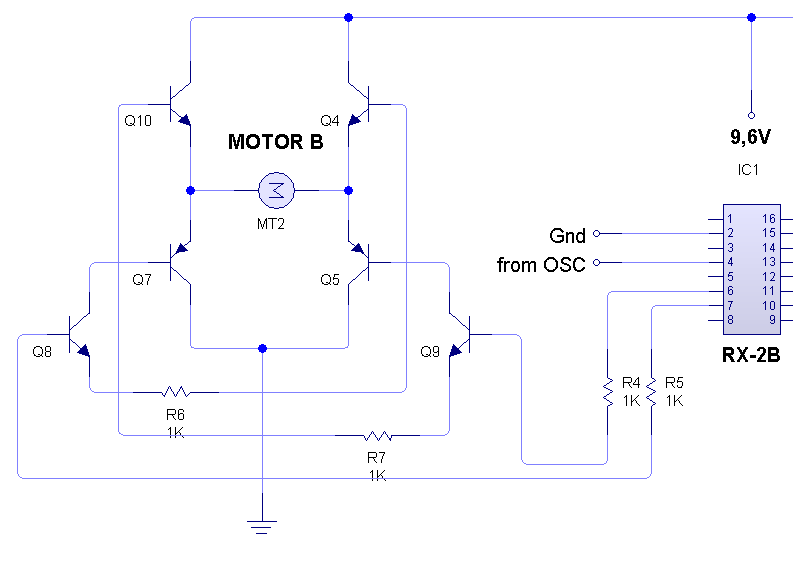
SKEMA H-BRIDGE - kemudi depan


Komentar